


Description
Description
Surveyor 240-16 is a 240 kHz multibeam echo sounder (MBES). It has a transmit beam approximately 4 degrees along track, 80 degrees cross track, and a 16-element receive array.
Surveyor 240-16 utilizes an angle-of-arrival estimation algorithm to measure cross track location of specific acoustic reflectors well in excess of the accuracy achievable with conventional beam-forming techniques. Thus, although the effective cross track beam width with conventional beam forming is about 7 degrees, Surveyor can resolve angle of arrival to less than one degree.
Depending on the range and acoustic properties of the bottom, Surveyor typically identifies 10-15 acoustic targets across track within a swath width of 80 degrees. The position and depth of these targets are then accurately calculated by range and angle of arrival.
Surveyor includes a built-in IMU. SonarView uses the Surveyor IMU for pitch and roll compensation and combines this with position and heading information from the vehicle to accurately place each depth measurement in its correct geographic location.
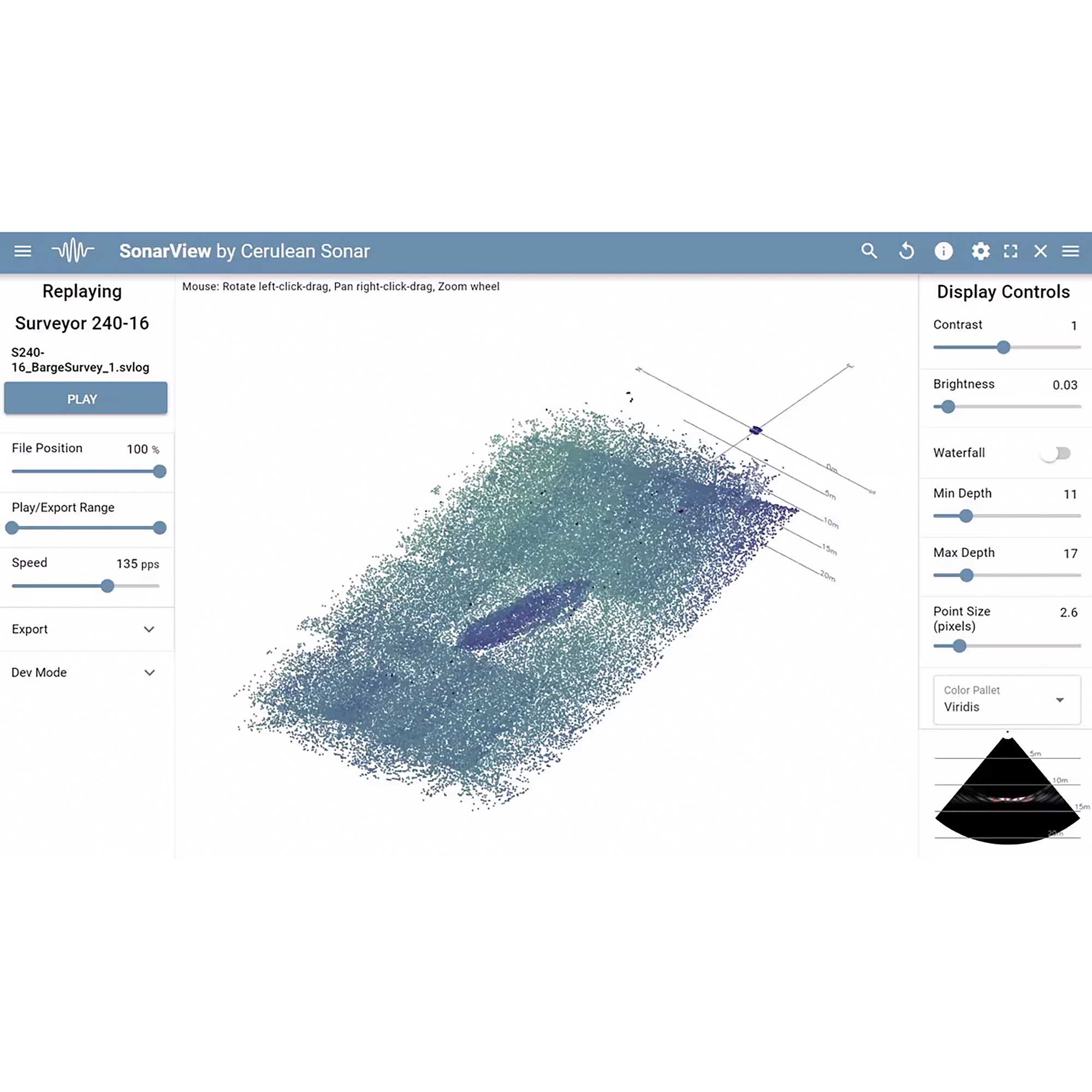
Cerulean SonarView software supports live capture, real time preview, offline mission replay, and data export for post processing.
During data collection, SonarView logs Surveyor attitude (pitch and roll), receive channel data, vehicle GNSS position, and vehicle heading.
Point cloud data is calculated and displayed in SonarView’s real time preview (see images below). A “fan view” image of each ping is also displayed which can be useful for assessing signal quality.
Speed of sound can be specified at export, at which the time the logged attitude and position data is processed to geographically corrected positions and depths.
Export formats include CSV point cloud data which can be imported for post processing in most hydrographic survey software.
In addition, SonarView supports Generic Sensor Format (GSF) export, a vendor independent data exchange format specifically targeting single and multibeam sonar data. GSF is designed to be modular and adaptable and is widely supported in the maritime community. GSF export from SonarView is currently available in beta version.
Based on customer feedback, additional formats will be considered.
SonarView is available in Windows, Linux, and macOS versions.
Included Contents
1x Surveyor 240-16 with Ethernet
1x Power Wiring Cable
1x Blue Robotics RJ45 to JST GH Adapter
Specifications
| Weight in Water | 240 kHz |
| Along track TX beam width | 4° |
| Cross track TX beam width | 80° |
| RX array # elements | 16 |
| Cross track beam width | 7° (conventional beamforming) |
| Cross track angular resolution | 1° (angle of arrival) |
| Range resolution | 0.5% of range setting |
| Maximum depth rating | 300m |
| Maximum suggested range | 50m |
| Power Supply | 10-30V, 5W typical at idle, 15W typical max while pinging |
| Data Interface | 100BaseT Ethernet |
| Electrical Connection | JST GH (4 pos) for data (Blue Robotics connector standard.) Tinned wires for connecting to power. A JST GH to RJ45 adapter is included. |
| Weight in Air | 790g |
| Weight in Water | 145g |
| Max bandwidth | 450 kbps |




